智能聲吶系統如何洞察海底世界
“你只有探索才知道答案。”這是科幻小說《海底兩萬裡》中的一句名言。海洋浩瀚無垠,海底世界無比豐富,如何探索其中奧秘,得到人們想知道的“答案”呢?
許多人可能第一反應是藉助“聲吶”。沒錯,這是一種利用聲波在水中的傳播特性,通過電聲轉換和信息處理,探測各類水下目標的位置、類型、運動方向等屬性的技術。對海底世界的探測和觀察,至今還沒有發現比聲波運用更有效的手段。聲吶系統成爲目前海洋技術裝備中應用最廣泛的一項技術。
自第一次世界大戰被用來偵測潛水艇開始,聲吶系統一直是各國海軍進行水下監視、偵測、攻防的“利器”。如對水下目標進行探測、分類、定位和跟蹤,在水下通信、導航,保障各類水面艦艇、水下潛艇、反潛飛機的戰術機動和水中武器使用,等等。
聲吶系統不僅在海洋軍事行動和海戰中發揮重要作用,在經略海洋、發展國民經濟等方面也同樣不可或缺。如水下探測魚羣、海洋石油勘探、船舶導航、水文測量和海底地質地貌勘測等,都離不開它。
隨着人類對海洋認知的加深與探測技術的進步,從最初的“水聽器”發展而來的被動聲吶,到有目的發射聲波的主動聲吶,再到兩者相結合的聲吶系統,儘管在技術上得到了突破,但傳統聲吶系統仍難以滿足現實所需。
在計算機技術、人工智能等現代科技大發展的時代背景下,集聲學、海洋科學、電子科學、計算機科學等衆多學科於一身的新一代智能聲吶系統隨之問世。
人工智能,賦予聲吶聰慧“大腦”
人工智能誕生於1956年,它的實質是模擬人的思維過程。
人的大腦在日常生活中,會對不同事物或信息產生不同體驗,並留下印象或記憶,形成經驗。當再次遇到類似事物或信息時,先前的經驗會被喚醒,併產生一系列相應的判斷與處理方式。
以機器學習爲代表的人工智能,模擬了這一過程:它借鑑人腦的神經系統,將其抽象化爲數學模型,然後使用不同類型數據,讓計算機發掘它們的差異,形成不同的“體驗”,並通過調整計算方法,形成“記憶”。當未知類型的數據輸入時,調整後的計算方法會憑藉自己的“記憶”,給出處理結果。
近年來,藉助人工智能,海洋科學家開始將聲音信號識別與人腦思維規律結合起來。
一般情況下,只有同時掌握了海域的海面、海體和海底等情況,才能較準確地掌握某一海域的聲學環境。然而現實情況是,由於海洋時空的變換,完整獲取以上3個方面信息往往很難。這就極大限制了人們探索未知海域的能力。
當科學家成功地將人工智能引入聲吶系統後,這一問題迎刃而解。科學家運用其中的機器學習技術,設計出了多種聲吶定位算法,並結合海試數據,驗證了智能聲吶算法的性能優勢和應用潛力。
未來,裝備了人造“大腦”的智能聲吶系統,將猶如一位經驗豐富的老水手,具備很強的環境適應能力。如果將其應用於海戰系統,可幫助戰鬥人員增強對未知環境的適應性。它既可使海上作戰系統繞開環境信息缺乏的阻礙,利用有限聲學數據還原目標的聲學特徵,有效實現水下目標定位,又能在聲學情報與實際環境出現差異時,通過智能聲吶定位技術,修正先驗信息中出現的誤差。
如今,在機器學習與聲吶技術這一新興學科交叉方向,其研究呈現出方興未艾之勢,推動着智能聲吶研究進入快速發展階段。
高分辨水下成像,讓聲吶“明察秋毫”
智能聲吶系統要在大海中“明察秋毫”,僅有聰慧的“大腦”還不夠,同時還要有一雙看得清、辨得明的“慧眼”,實現對水下目標高分辨成像。
於是,科學家將具有高分辨成像的合成孔徑雷達技術引入聲吶系統,並將側掃聲吶與合成孔徑聲吶結合在一起。這樣,就給智能聲吶系統添上一雙明察秋毫的“慧眼”,具有了水下高分辨成像的本領。
側掃聲吶技術採用傳統的回聲測深原理,具有探測速度快、目標定位快的優勢。與普通聲吶不同的是,它向海底發射的探測聲波呈扇形,並在海底形成長條形投射區。隨着聲吶設備在探測中不斷移動,海底目標就能像拼圖一樣被細分成許多塊,一一捕捉目標的細節特徵及高度信息。在這張“拼圖”上,既有捕獲的海底不同物體的形貌特徵,又能幫助人們識別探測目標的種類,如同陽光灑在大地上所呈現的色彩繽紛的光學世界一樣。
不僅如此,它還能根據不同探測目的,選擇不同頻率的發射波束,對不同物質、不同頻率聲波產生不同的散射強度,使漆黑的海底也能變得“五彩斑斕”。
相比之下,合成孔徑聲吶則具備更清晰的成像能力。它利用小孔徑基陣的移動,來獲取方位方向的高分辨力,能實現更廣的探測範圍,還能利用低頻段聲波探測到被泥沙掩埋的目標。就如同給海底探測器裝上了一臺X光機,幫助人們探測到大洋中更多的奧秘。
目前,以側掃聲吶與合成孔徑聲吶爲代表的高空間分辨智能聲吶系統,在海洋測繪、勘探領域已得到成熟應用。如用來鑽探發現海底“可燃冰”資源,協助潛水員執行水下搜尋救助作業等。國外一些研究機構還將合成孔徑聲吶技術用於水下潛航器,構建起新型水下成像系統,有效促進水下無人作戰能力穩步提升。
總之,擁有高分辨成像能力的智能聲吶系統,讓各類水下目標顯露出“真容”已不再是設想。
多方位融合,打造聲吶“多面手”
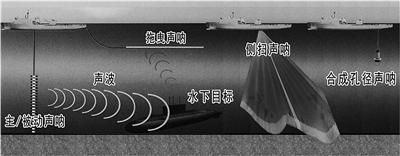
傳統聲吶系統的工作方式,有主動式和被動式兩種。主動式聲吶系統像是探路的蝙蝠,一邊自主發射聲波,一邊接收回波,以此刻畫目標區域的基本特徵;被動式聲吶系統像是“順風耳”一樣的傾聽者,能將目標區域發出的所有聲學信號收入囊中,從嘈雜聲音中發現目標的“蛛絲馬跡”。
隨着現代科技發展,這兩種聲吶系統的缺點也愈發明顯。特別是在潛艇降噪技術和潛艇戰術不斷進步的背景下,單一工作方式的聲吶系統侷限性更是顯而易見:主動式聲吶系統由於聲波發射與回波接收均在同一處,工作時容易暴露自身方位;被動式聲吶在面對安靜型潛艇時,探測能力捉襟見肘。
面對日趨複雜的海戰環境,現代智能聲吶系統一大優勢是,能利用多平臺融合技術,實現聲吶平臺的“聯動”。以目前常用的諸如岸基式、艦載固定式、艦載拖曳式和航空式聲吶平臺爲例,它們各具優勢,但也各有不足:岸基式聲吶機動性差,一旦暴露即失去存在價值;艦載固定式聲吶極易受到艦艇自身噪聲干擾,且尺寸有限,探測能力受限;艦載拖曳式聲吶機動性差;航空式聲吶在使用時易受天氣影響,探測區域和探測深度受限。
如今,科學家參照物聯網的思路,將主被動聲吶系統、多平臺聲學傳感器整合進一個互聯網絡,使網絡中的主動式聲吶、被動式聲吶可以隨時切換,艦載聲吶、岸基固定陣聲吶、航空式聲吶等同時作業、相互補充,對海面、海底和海體全海域空間實施全覆蓋,通過內部互聯網絡,實現水下聲學數據共享,即可打造出一套具有多種功能的智能聲吶系統。
這種多基地、多方位相融合的智能聲吶系統,一些軍事強國一直在進行研究探索,在“海網”“近海水下持續監視網”等水下網絡項目上取得較大進展。
以國外“海網”爲例,該系統由岸基固定式節點和潛艇、潛航器、海底爬行車等多個移動節點組成,各節點之間通過水聲通信鏈路相連,可實現不同節點之間數據實時共享。藉助該網絡,潛艇不僅可以獲取水下聲學信息,還能與其他海、陸、空天平臺共享,從而提高反潛作戰能力。
據報道,國外的“近海水下持續監視網”已基本具備作戰能力,可通過潛艇釋放多個無人潛航器,構建一個臨時動態水下網絡,獲取周邊海域的聲學信息,並誘使敵方提前暴露,以搶佔先機。
版式設計:樑 晨
相關資訊
- ▣ 這些早期系統如何塑造神奇網絡世界
 《新奇蹟世界》副本系統:如何創建副本介紹
《新奇蹟世界》副本系統:如何創建副本介紹- ▣ 能源系統期待更強氣候洞察力
- ▣ 海底撈系業績表現到底如何?
- ▣ 如何用底層邏輯,看清世界的底牌?
- ▣ 如何徹底關閉系統更新功能的詳細步驟解析
 《鳳舞天驕2》聲望系統:如何獲得聲望介紹
《鳳舞天驕2》聲望系統:如何獲得聲望介紹- ▣ 優化電力系統調節能力,儲能如何唱好這臺“戲”?丨電改觀察②
- ▣ Adobe洞察:人工智慧堂前燕,如何飛入尋常市場家?
- ▣ 博世底盤控制系統中國區總裁陳黎明:博世如何去做冗餘設計?
- ▣ MES系統和IOT系統如何對接 ?
- ▣ 用好智能系統 防治噪聲擾民
 深演智能CDP,如何助力企業洞察客戶,提升用戶體驗,驅動業務增長?
深演智能CDP,如何助力企業洞察客戶,提升用戶體驗,驅動業務增長? 名勝世界連破世界紀錄 超大海洋觀景窗如置身海底
名勝世界連破世界紀錄 超大海洋觀景窗如置身海底 如何處理美中臺關係? 侯:臺海安定 臺灣安全 世界放心
如何處理美中臺關係? 侯:臺海安定 臺灣安全 世界放心- ▣ 上海:到2025年底,建成世界級人工智能產業生態
 山東海水宛如阿凡達世界 熒光海灘如何煉成?
山東海水宛如阿凡達世界 熒光海灘如何煉成?- ▣ 如何徹底刪除系統更新以釋放存儲空間
- ▣ 博鰲圖跡|熱議生成式人工智能 共話AIGC如何改變世界
- ▣ 南國智庫·財經觀察丨海南:東坡文化如何賦能旅遊商品?
- ▣ 新華時評|中國新能源產業如何造福世界——中國先進產能的世界意義系列評論之二
 你敢嘗試?深度達14層樓 世界最深泳池如「無底洞」
你敢嘗試?深度達14層樓 世界最深泳池如「無底洞」- ▣ 智能汽車產業趨勢洞察
- ▣ Sora如何理解世界?AI如何賦能科研?深港學者齊探討
- ▣ Win7如何優化系統性能提升使用體驗
- ▣ 瑤光 C-DM 電四驅的“雪豹四驅”系統如何實現智能駕駛體驗?
- ▣ 價值萬億的具身智能市場,大佬們如何從世界模型下刀?
- ▣ 生成式人工智能如何改變世界?張亞勤、羅素、曾毅這樣說
- ▣ 世界海嘯意識日|如何應對大海的“暴脾氣”?